Stream Concept CX5-E F5K
Private Baudokumentation
Diese Seite befasst sich mit der Baudokumentation eines Stream Concept CX5-E F5K. Es handelt sich um eine rein private Dokumentation. Mein besonderer Dank geht an Rollo Sommer, der mir bei diesem Projekt mit Rat und Tat beiseite stand.
Technische Ausstattung:
- Model: Stream Concept CX5-E F5K (Bezug über Roland Sommer)
- Antrieb: Cobra CM1806/26 2.800Kv (Bezug über Aeromodelis)
- Regler: PULSAR A-15 mit BEC
- Luftschraube/Spinner: Aeromodelis
- Servos: 4x KST X08H V5
- Anlenkung: Kreuz
- LiPo: mylipo 450mAh 7,4V 2S 50C/100C FPV Parcour – XL
- Sender: JETI Duplex 2,4EX Handsender DS-16
- Empfänger: JETI Duplex R5L EX
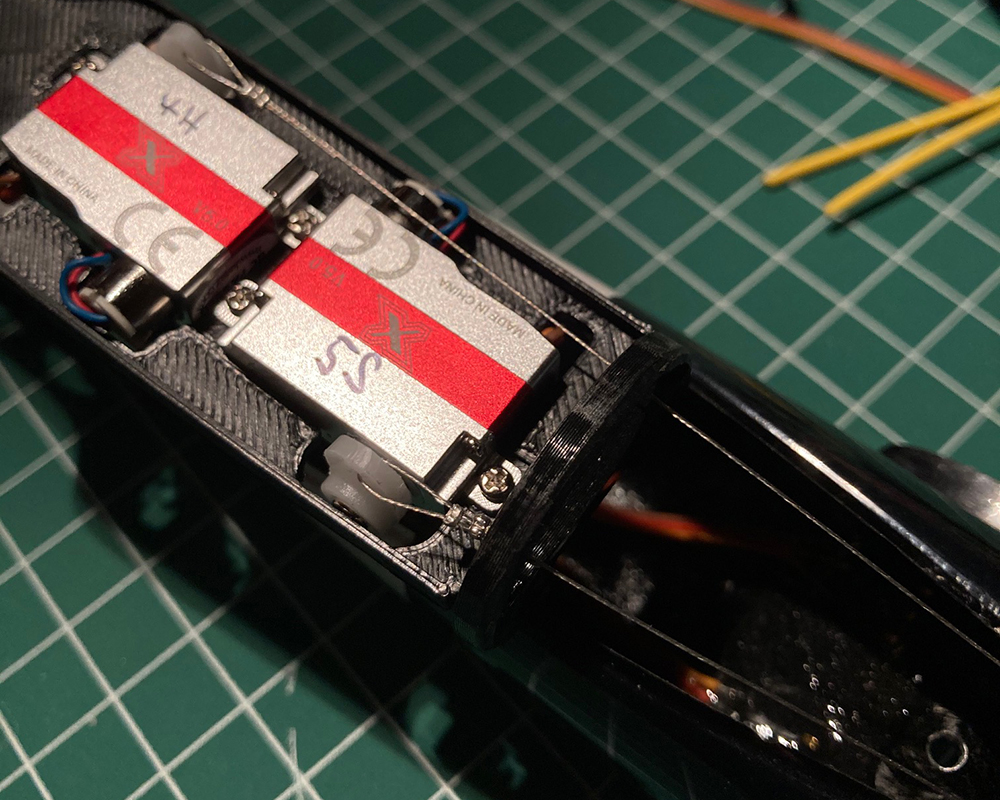
- Telemetrie: UniSens-E 55 A / XT30
Gewichte:
- Rumpf: 31,9 g
- Fläche: 118 g
- Höhenleitwerk: 5,4 g
- Seitenleitwerk: 8,7 g
- Flächenschrauben: –
Sonstiges:
-
- Empfänger: 5,4 g
- mylipo 450mAh 7,4V 2S 50C/100C FPV Parcour – XL: ca. 31 g
- 4x KST X08H V5: 9,5 g
- UniSens-E: 7,5 g
- Motor: 25 g
- Regler: 6 g
Abfluggewicht:
285g
Abfluggewicht inkl. LiPo (ohne UniSens-E).
Schritt für Schritt:

Da liegt er, frisch aus der Form sozusagen. Vielen Dank an Rollo für die unkomplizierte Bestellabwicklung, die ausführliche Beratung und die zahlreichen Tipps und Tricks!


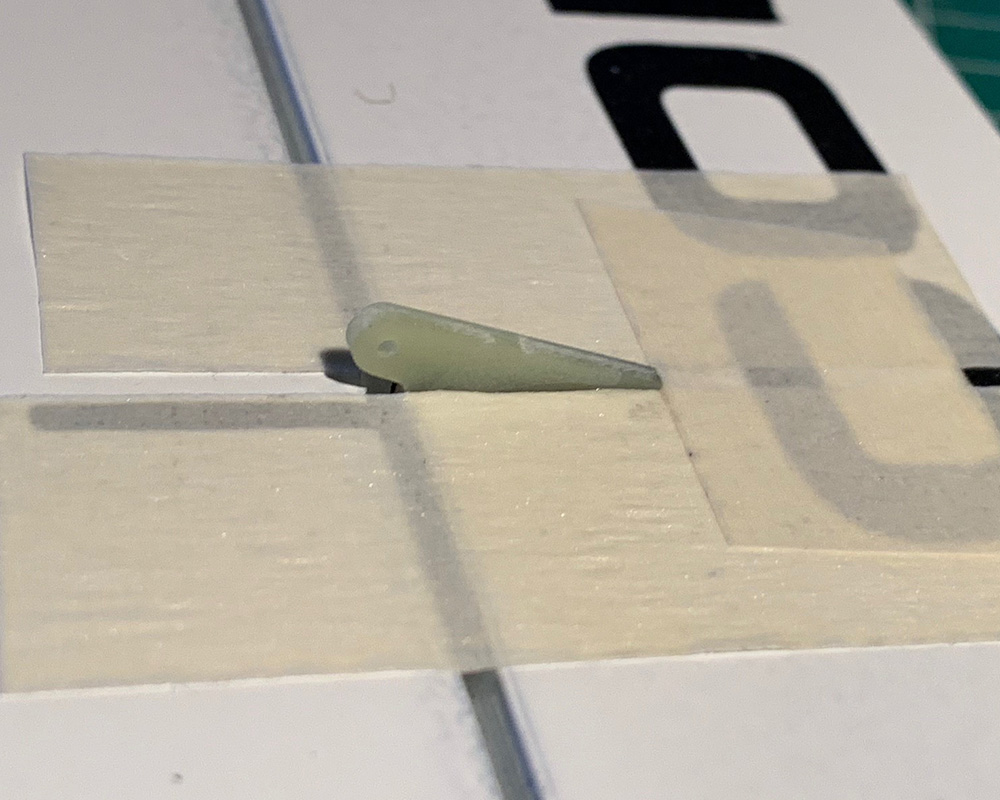
Ich beginne mit dem einkleben der beiliegenden Ruderhörner in die Fläche. Dazu werden die Klebeflächen auf beiden Seiten aufgeraut, in meinem Fall mit einem Diamant-Schleifstift.

Um eine Verunreinigung der Flächen durch Klebstoffüberstand entgegenzuwirken, schütze ich die entsprechenden Stellen mit Kreppband.
Verklebtes Ruderhorn. Verklebung mit 24-Stunden-Epoxy oder mit CA (Cyanacrylat-Klebstoff). Bei CA auf die Viskosität achten. Dünnflüssiger CA würde unter das Kreppband kriechen!

Winkel an Anlenkstange anbringen und entsprechend kürzen.
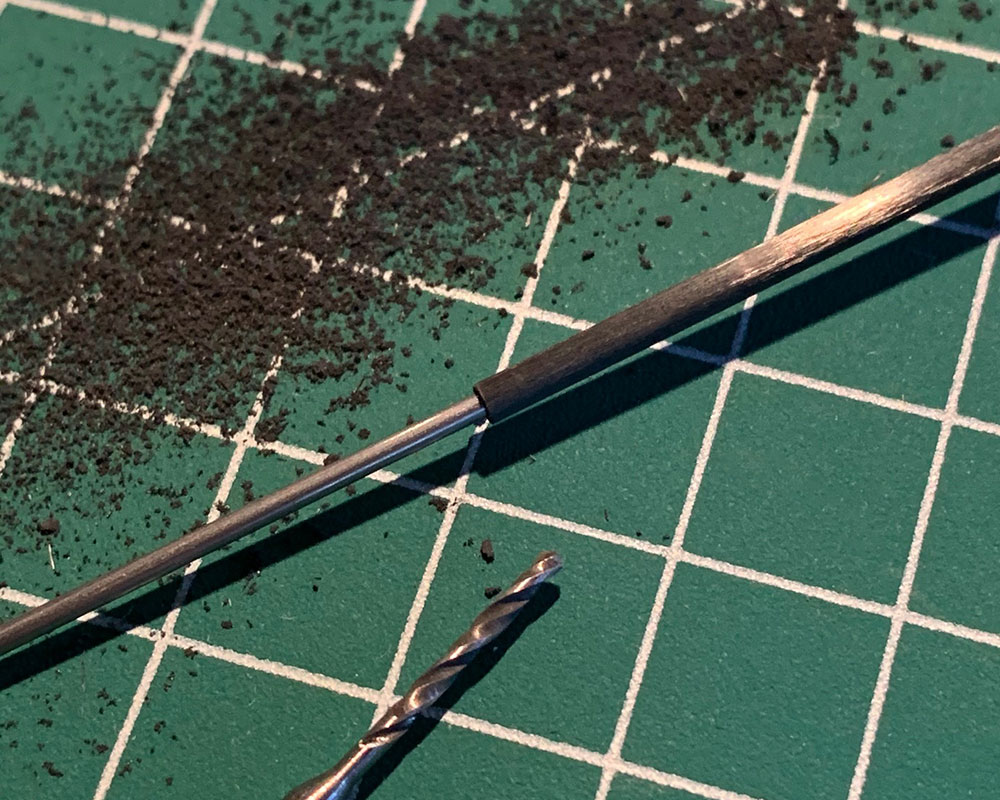
Anfertigen der Ruderanlenkung. Durch die Winkel an beiden Enden lässt sich die Anlenkung nicht in einem Stück durch die Fläche führen. Sie muss zweigeteilt werden. Die beiliegende Anlenkstange hat einen Durchmesser von 1,2 mm. Ich verwende ein Kohlefaserrohr mit 2,0/1,0 mm und bohre es mit 1,2 mm auf. Die Anlenkstange wird aufgeraut und eingeklebt.
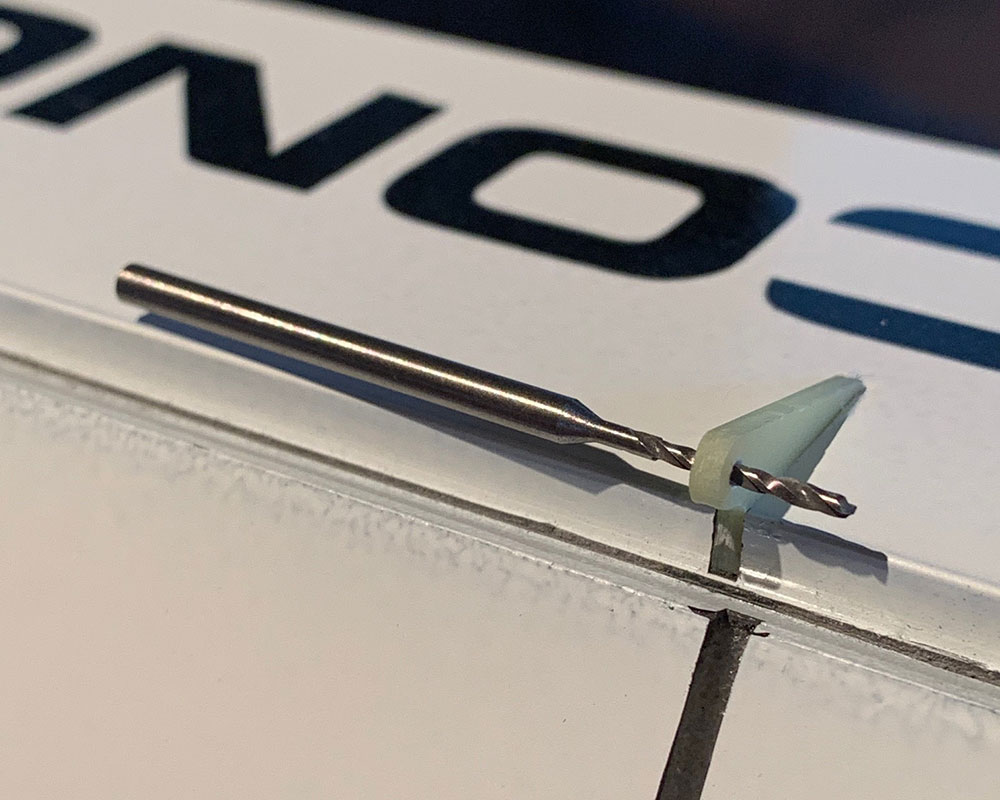
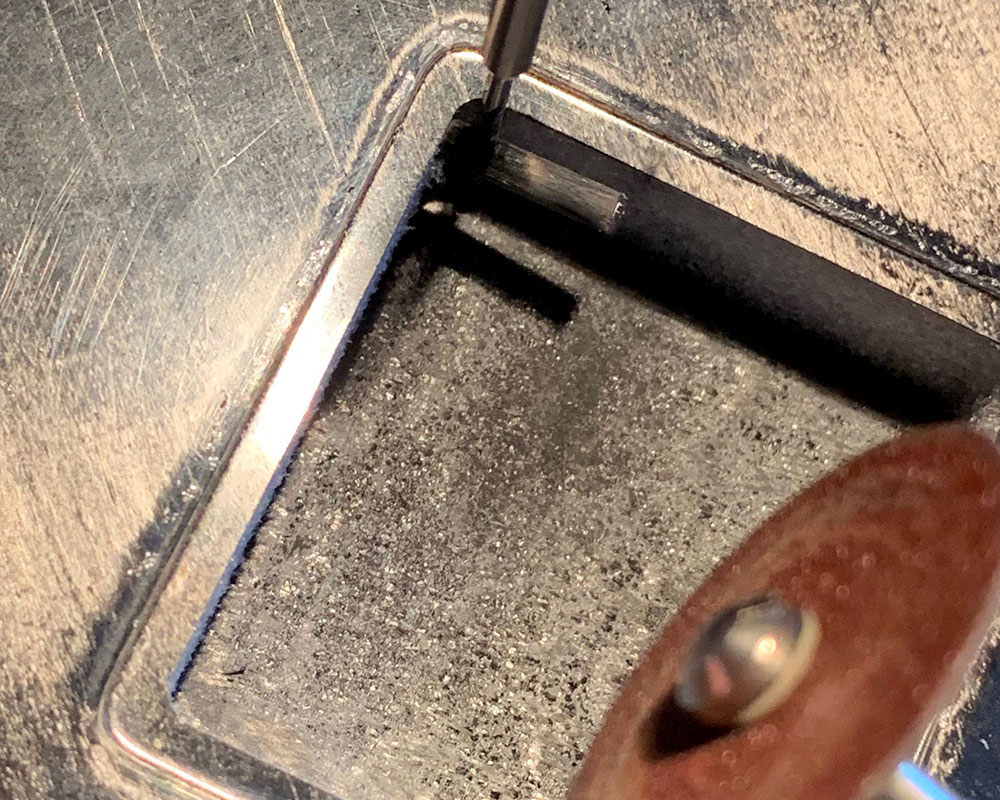
Mit einem kleinen 1,2 mm-Bohrer wird das Ruderhorn für die Anlenkung modifiziert.
Die Anlenkung wird in die Fläche eingeführt und am Ruderhorn eingefädelt. Ich habe dazu das Ruder händisch auf vollen Ausschlag getrimmt.
Im Servoschacht kürze ich nun das Kohlefaserrohr auf die gewünschte Länge.
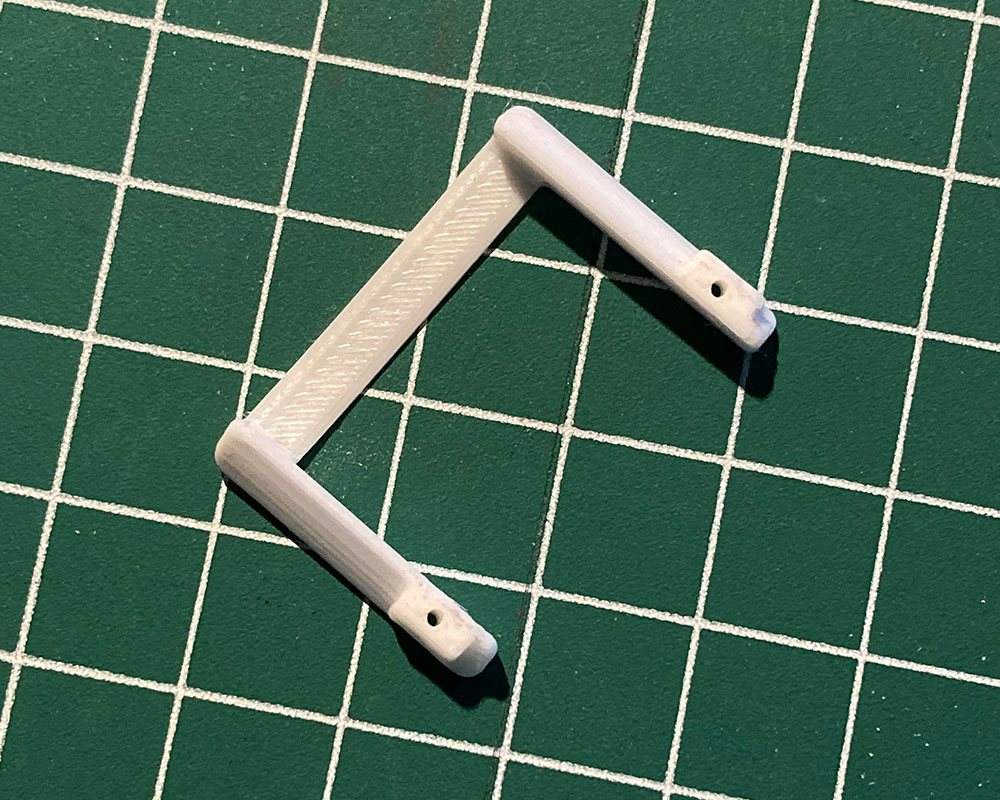
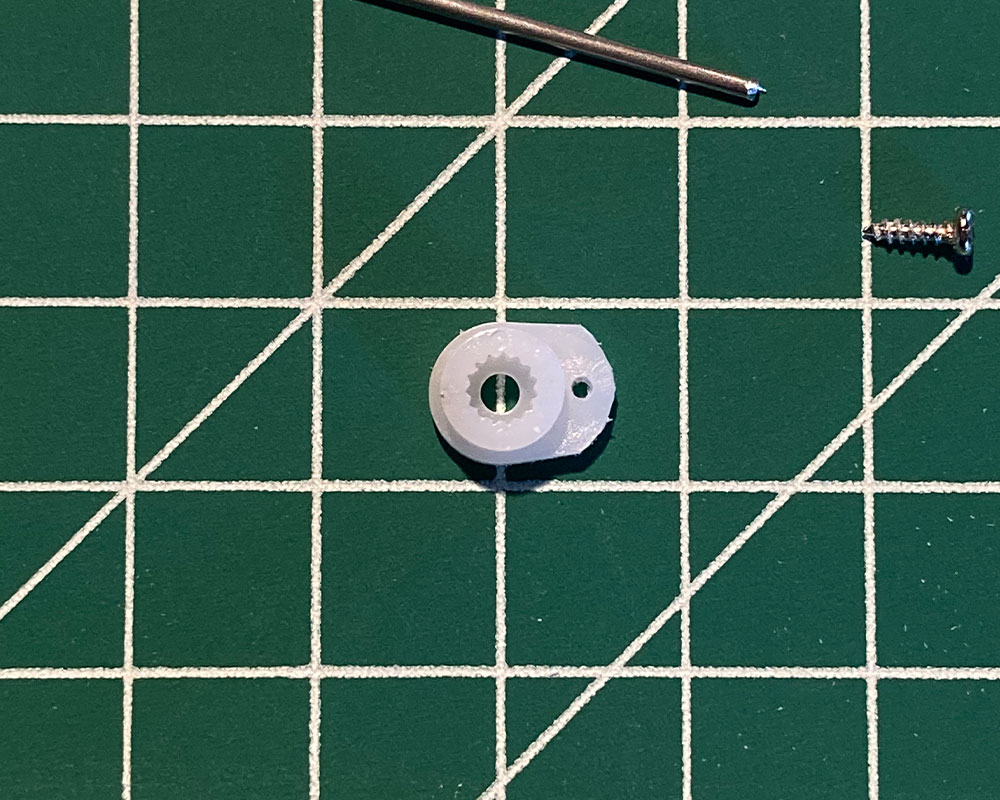
Vorbereiten der Servorahmen. Ich habe diese in einem 3D-Programm angelegt, mein Kollege Jeremy war so freundlich und hat mir diese zweimal im 3D-Druck angefertigt. Vielen Dank dafür. Die Schraubenlöcher habe ich mit einem 1mm-Bohrer nachgebohrt.
Die STL-Datei für den Servorahmen findet Ihr unter der Rubrik „Downloads“.
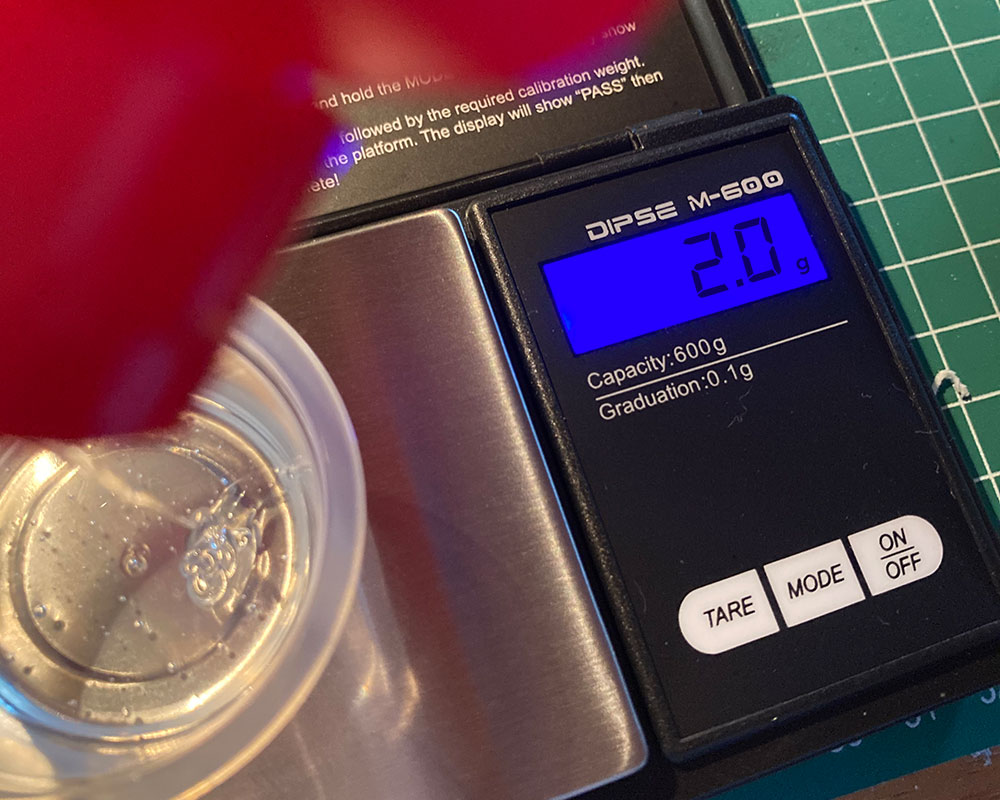
Anmischen des Epoxidharzes. Ich verwende 30 min.-Epoxidharz (mittels Spritze mit Dosierkanüle).

Eingeklebter Servorahmen.

…
Es geht eng zu. Fräse ein Halbrund am Servoschacht zur besseren Erreichbarkeit der Servo-Schrauben.

Modifikation der Ruderhörner (2x Querruder).
Fertiges Ruderhorn

Das sind die beiden Anlenkungen, die dann in den Carbonstab eingeklebt werden.
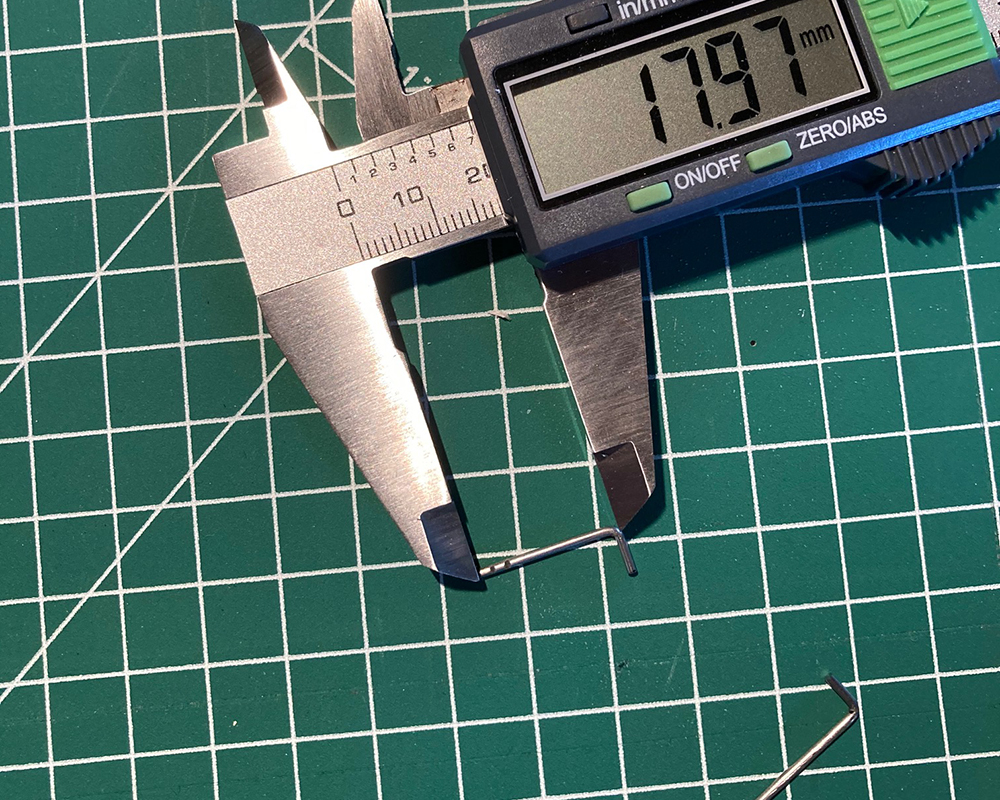
18 mm mit Einkerbung für bessere Klebeverbindung.
Bevor die Ruderanlenkung (Fläche) fertiggestellt wird, widme ich mich der Stromversorgung sowie Signalübertragung von Rumpf zur Fläche. Entgegen der üblichen Steckverbindung möchte ich es mit zwei Druckkontakten lösen.

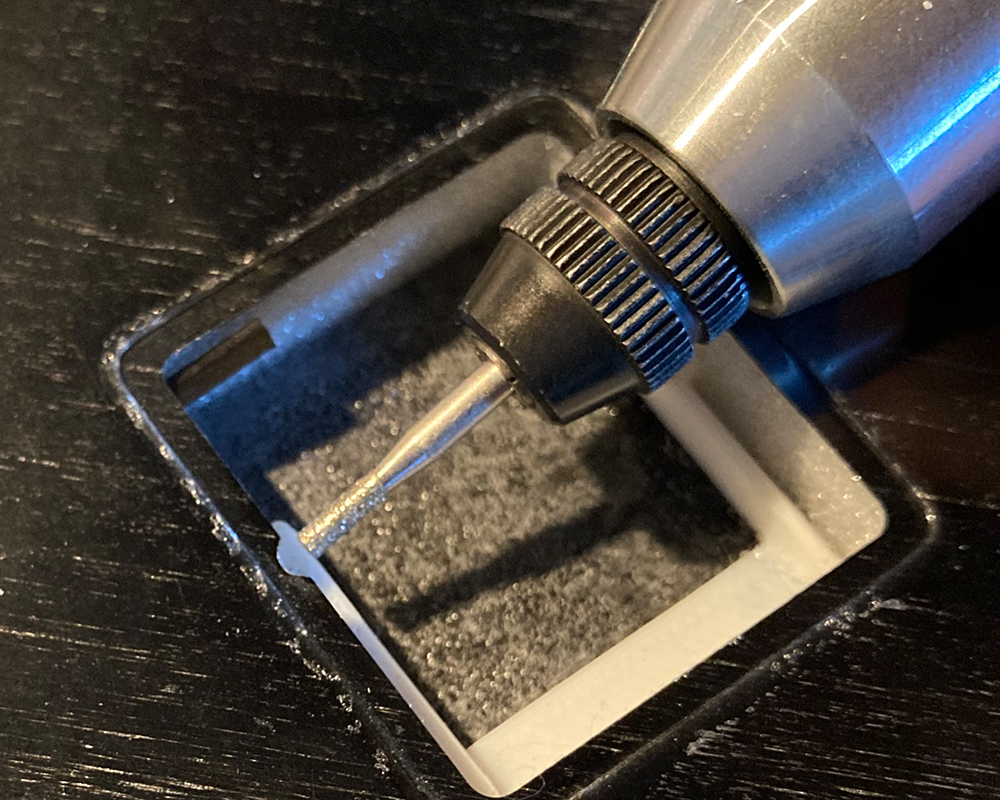
Vorsichtiges, grobes Ausfräsen der beiden Öffnungen.

Feine Nacharbeit mit der Feinmechanikfeile von Hand.

Anlöten der Servokabel. Die Servokabel habe ich in diesem Fall je bei 70 mm Länge abgeschnitten und in die Fläche eingefädelt.
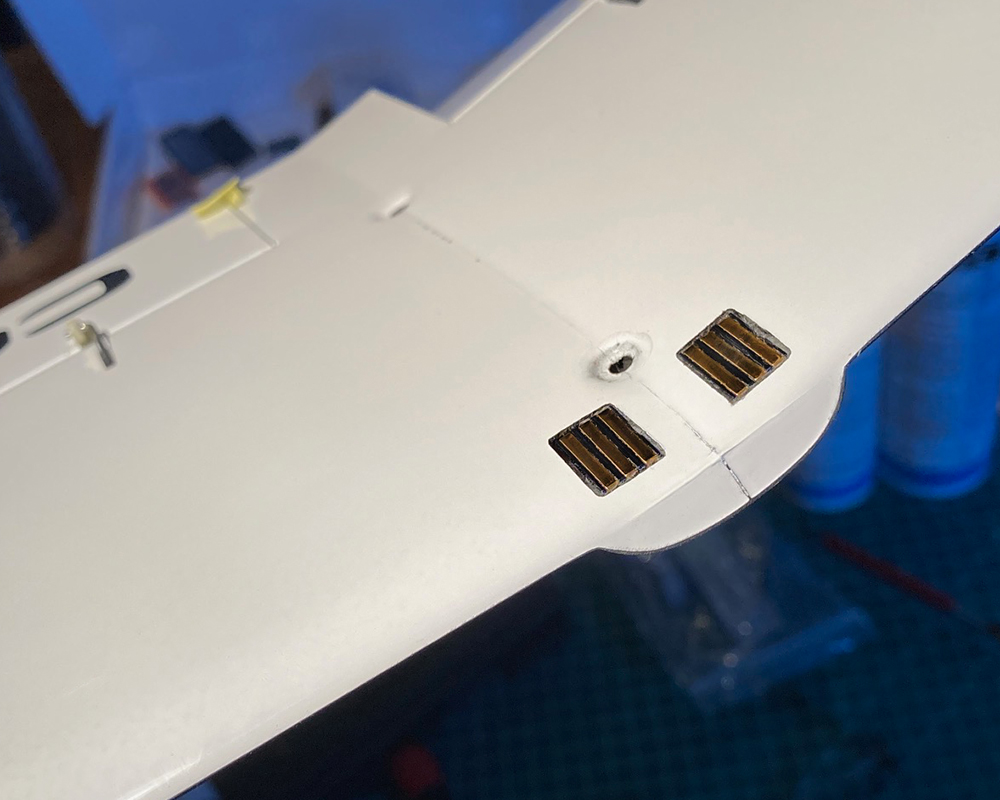
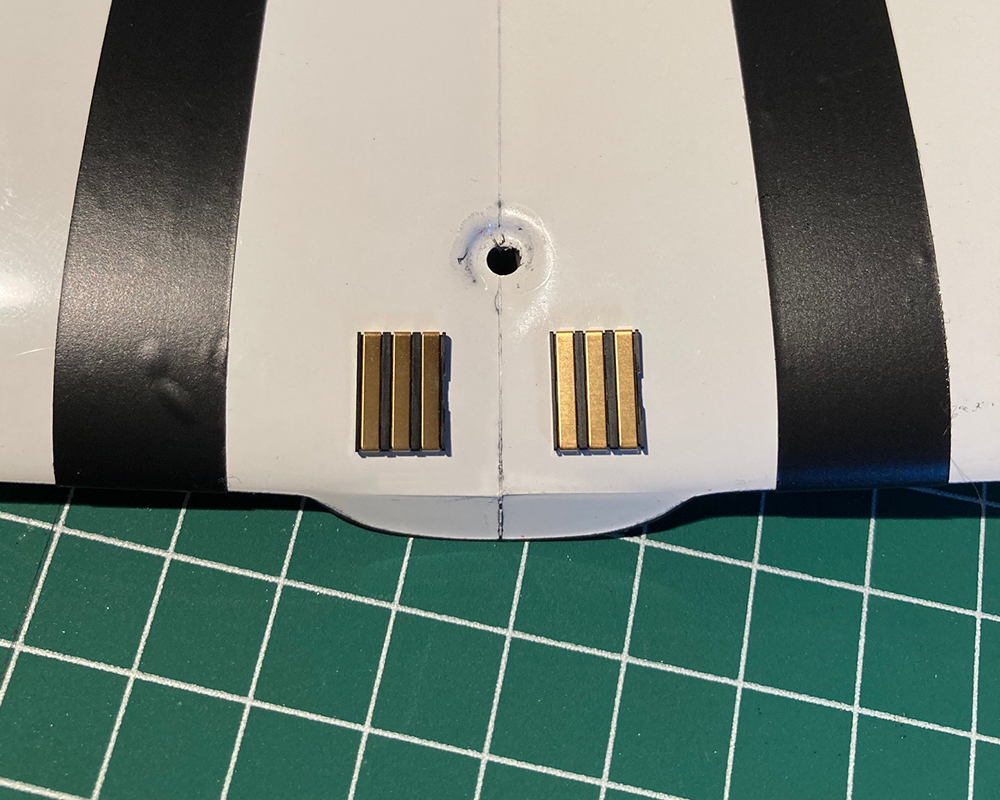
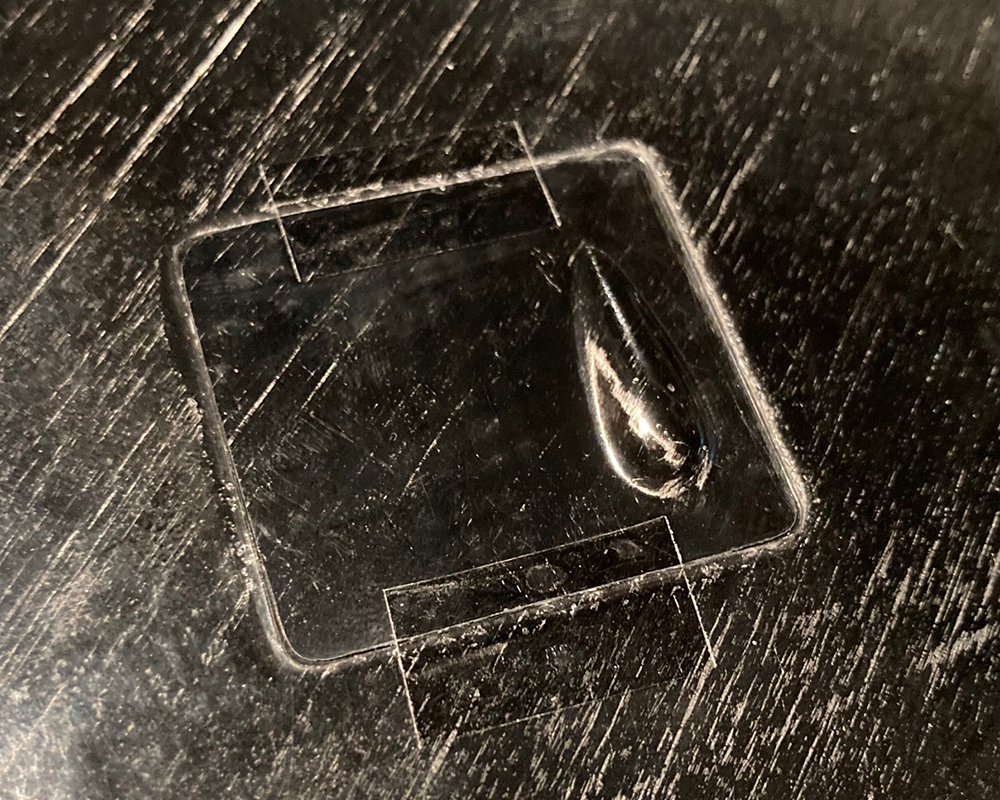
Eingeklebte Druckkontakte in der Fläche. Ich habe 3-5-Minuten-Epoxy verwendet, wobei das schon sehr schnell abbindet. Zu schnell. Ich empfehle 30-Minuten-Epoxy.
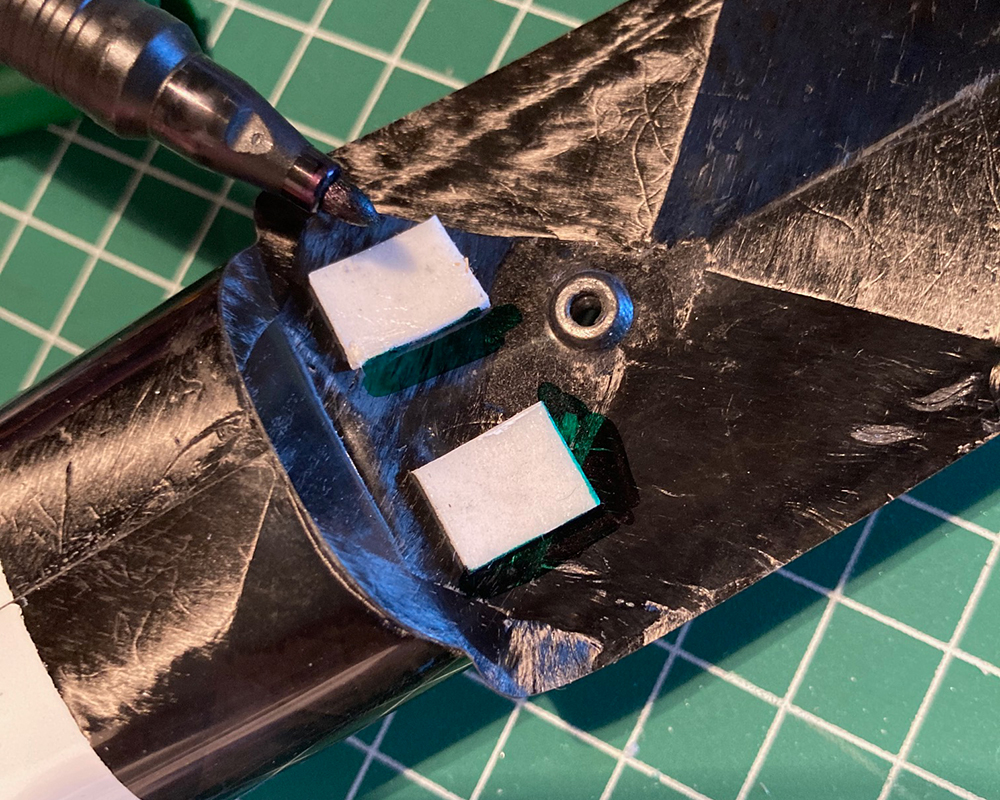
Übertrag der Kontaktposition mit doppelseitigem Klebeband. Die Position habe ich dann mit grünen Permanent-Marker umrandet, doppelseitiges Klebeband folgend wieder abgezogen.
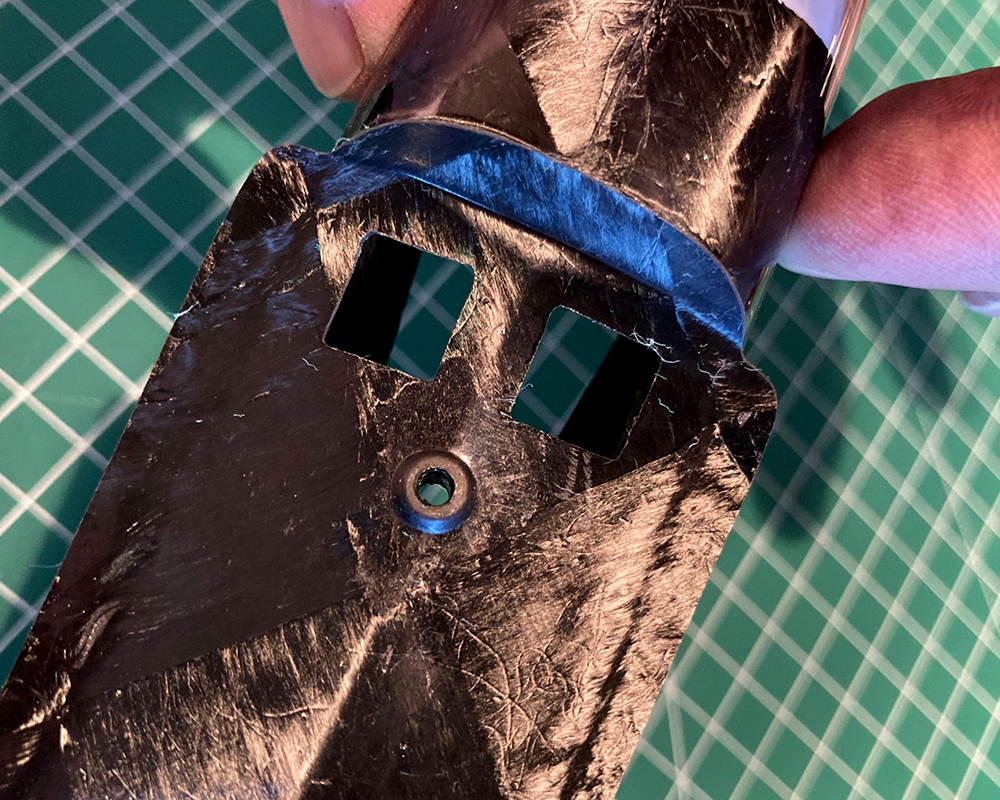
Öffnungen am Rumpf für die Druckkontakte. Von Hand gefeilt.

Einkleben der Druckkontakte mit viel Hilfsmittel…

Fixierung der Kontakte im Rumpf mit Epoxy.
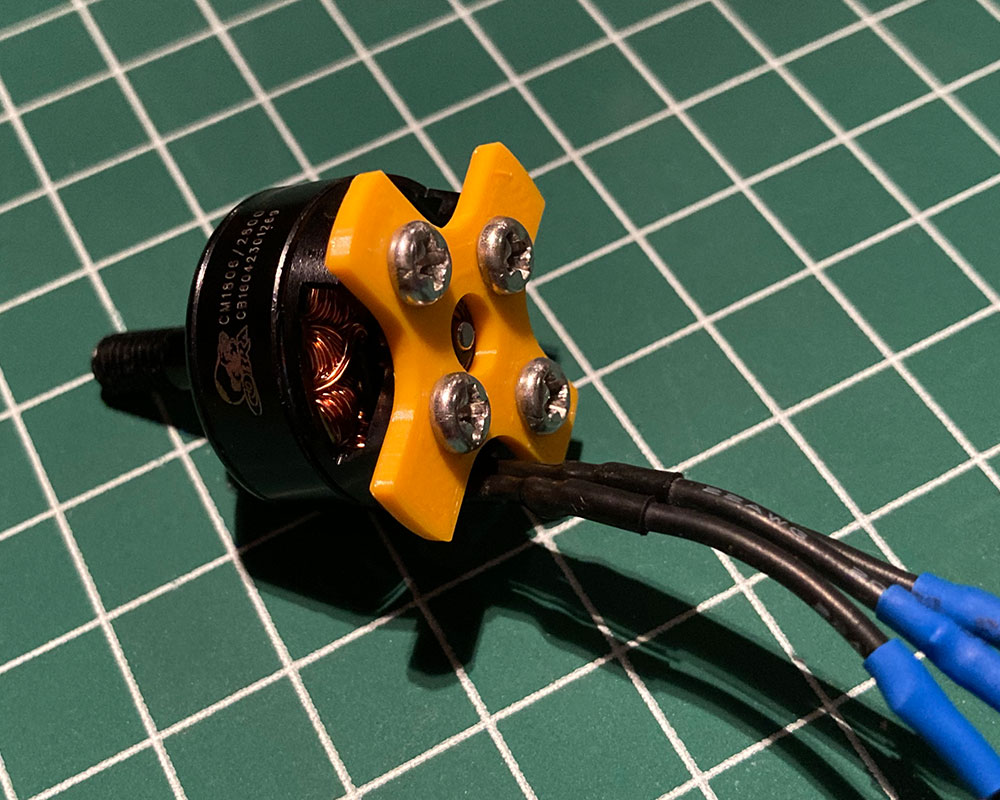
Montierter Motorspant aus dem 3D-Drucker. Die STL-Datei dazu werde ich im Downloadbereich ablegen.

Eingeklebter Motorspant (mittels CA-Kleber).
Achtung: wer sich Gefummel beim Einbau des Servobretts weitestgehend ersparen will, springt an dieser Stelle zuerst zu Punkt 41 und klebt erst dann den Spant ein, nachdem das Servobrett fertig im Rumpf montiert ist.

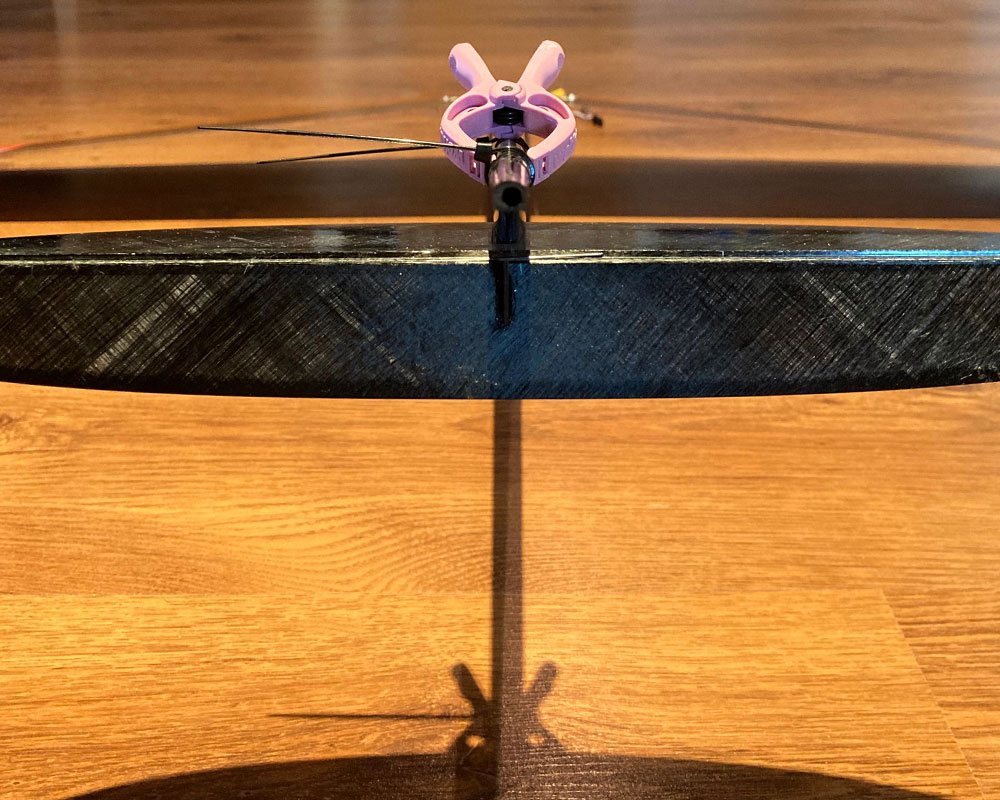
Fertige Montage Motorspant und Spinner.

Anlenkung der Querruder fertigstellen. Die in Schritt 17/18 angefertigten Anlenkungen werden in den Carbonstab eingeklebt. Ich verwende hierzu UHU Endfest 300. Dann werden die Servos festgeschraubt.

Ich stecke die Servos an, aktiviere den Sender und stelle sämtliche (Digital-) Trimmungen der Ruder auf neutral. Die Querruder werden dann in neutraler Position fixiert bis der Kleber ausgehärtet ist.

Anbringen der Ruderhörner an Höhen- und Seitenruder. Ich schneide jeweils die Position mit einem Cuttermesser vorsichtig vor und klebe die Ruderhörner mit CA ein. Entgegen anderer Beschreibungen im Netz nehme ich für das Höhenruder das Ruderhorn mit der offenen Öse, da das Höhenruder im Gegensatz zum Seitenleitwerk abgeschraubt werden könnte und damit nur diese Öse Sinn macht.

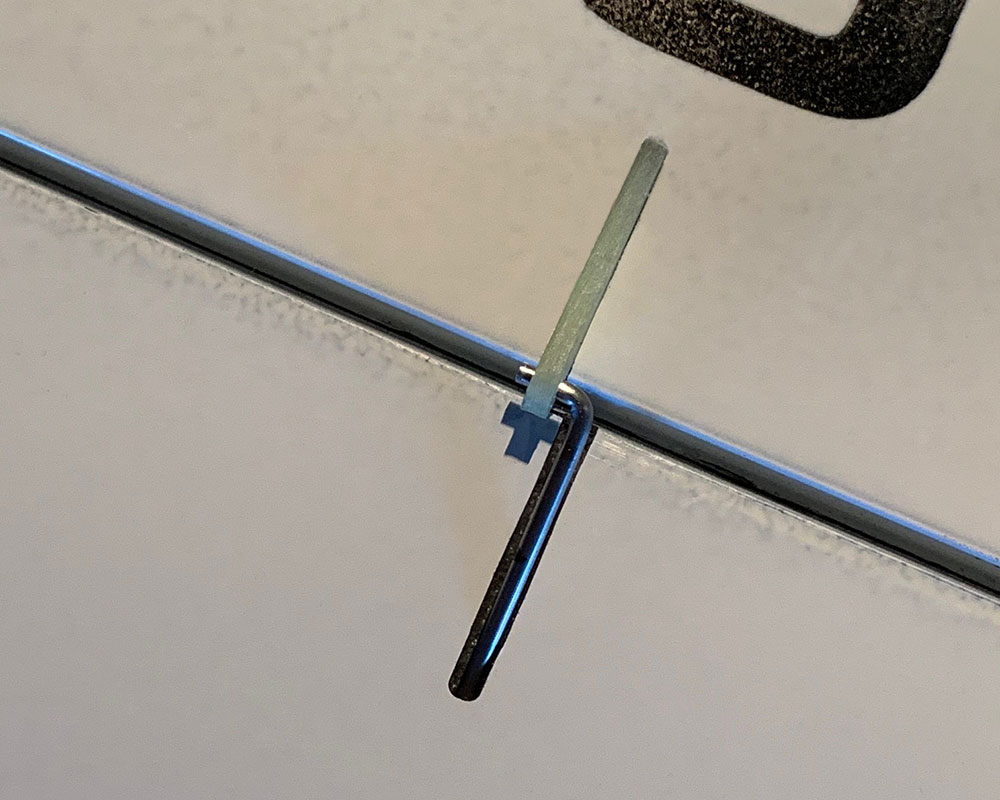
Biegung der Ruderrückholfeder aus Federdraht.

Am Rumpfadapter des HLW bohre ich ein kleines Loch für die Durchführung eines kleinen Carbon-Hohlstab für die Zugführung der Ruder-Anlenkung.
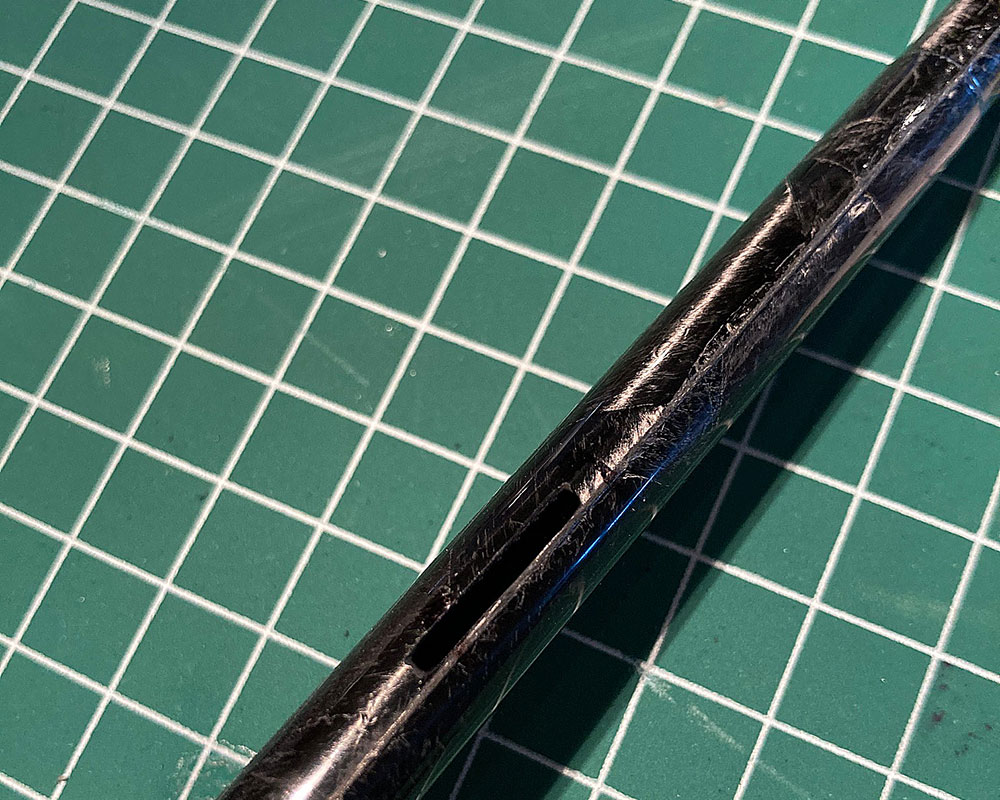
Am Rumpf wird die Position für das Langloch des Hohlstabs angezeichnet und ausgefräst.
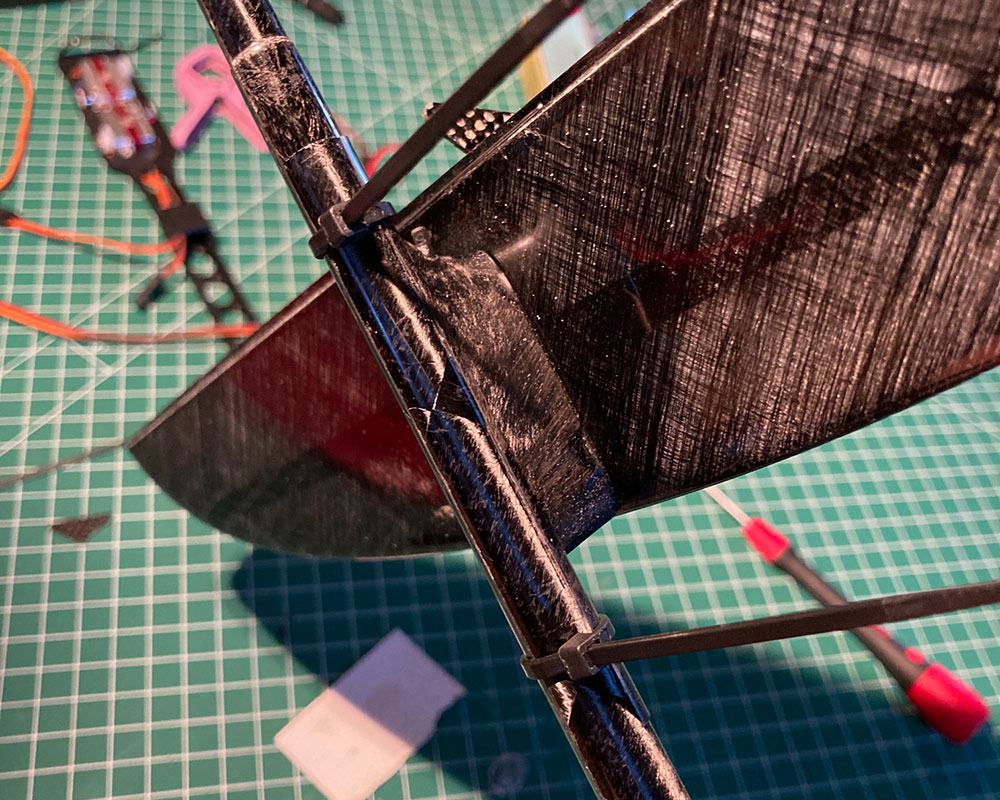
Das HLW wird nun auf den Rumpf aufgesetzt, der Carbon-Hohlstab in den Rumpf eingefädelt und dann mit zwei kleinen Kabelbindern fixiert.
Das Modell wird nun mit montierten Flächen auf dem Boden oder einer beliebigen ebenen Fläche auf den Rücken gelegt. Nun lässt sich das HLW nochmals exakt ausrichten bevor es mit CA-Kleber fixiert wird.

Carbon-Hohlstab/Führung der HLW-Anlenkung im Detail.
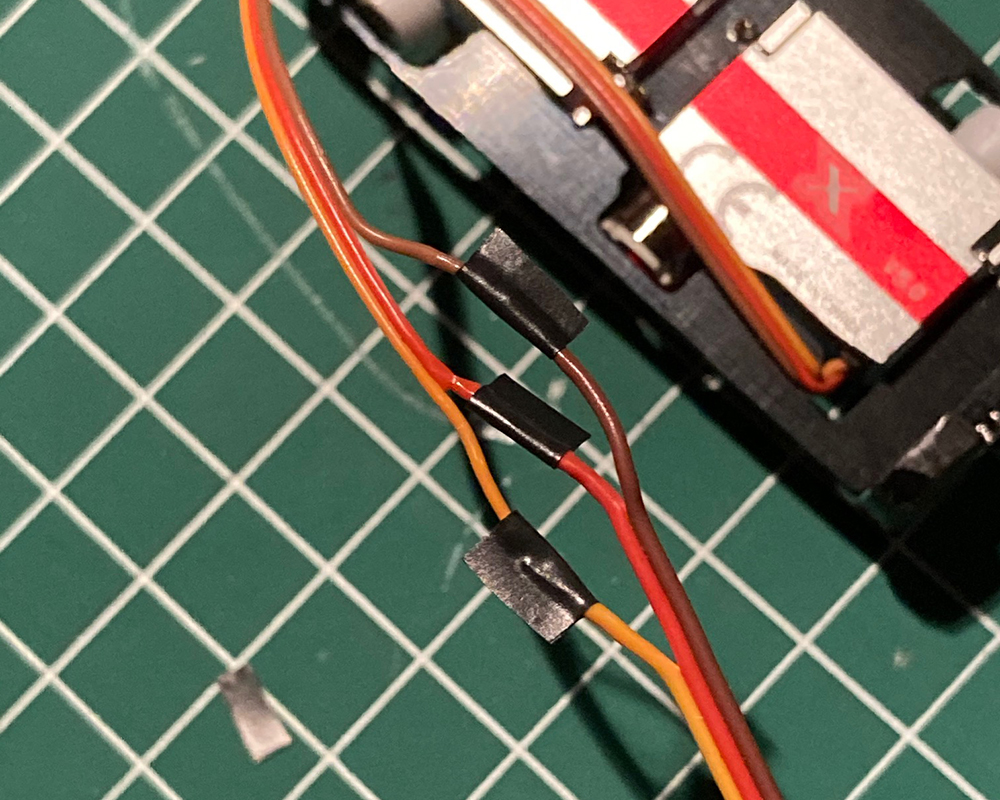
Vorbereitung Servobrett. Ein Servokabel muss verlängert werden, die Verlötung habe ich versetzt vorgenommen und die freiliegenden Lötverbindungen zusätzlich mit Isolierband isoliert. Das Ganze wird dann noch mit Schrumpfschlauch ummantelt.
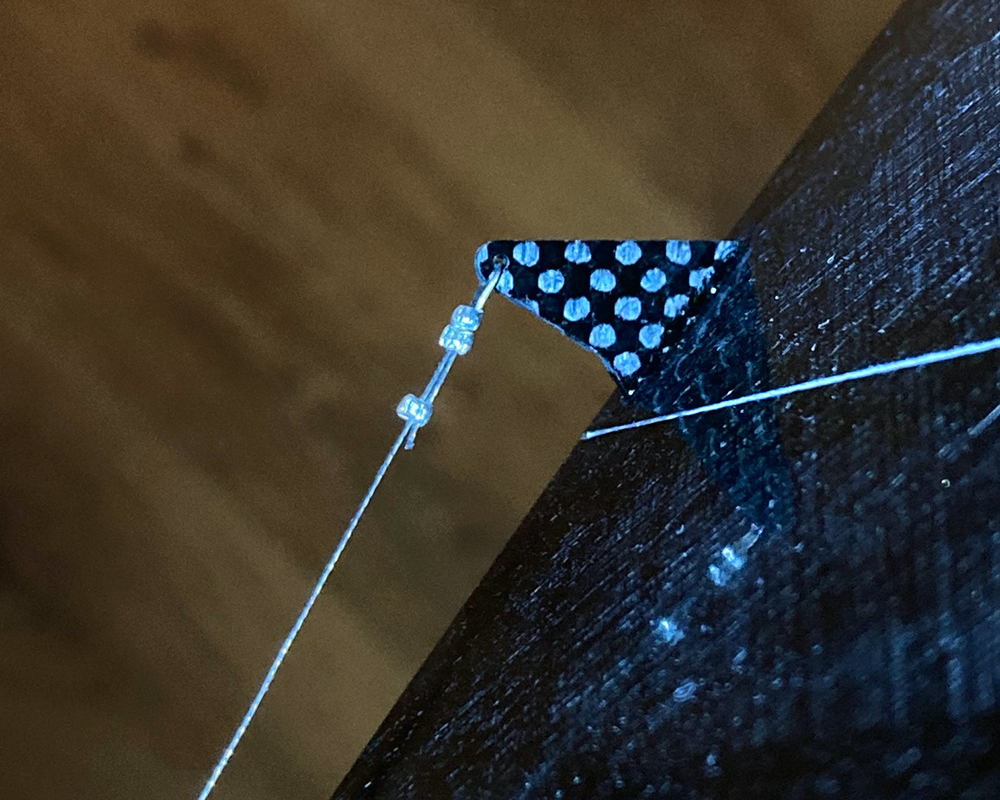
Die Anlenkungen sind angebracht. Wobei ich hier nochmals nachgebessert habe… (siehe nachfolgende Abb.)

Die Schlaufe ist wesentlich enger am Servoarm gecrimpt und vermindert so unnötiges Ruderspiel.

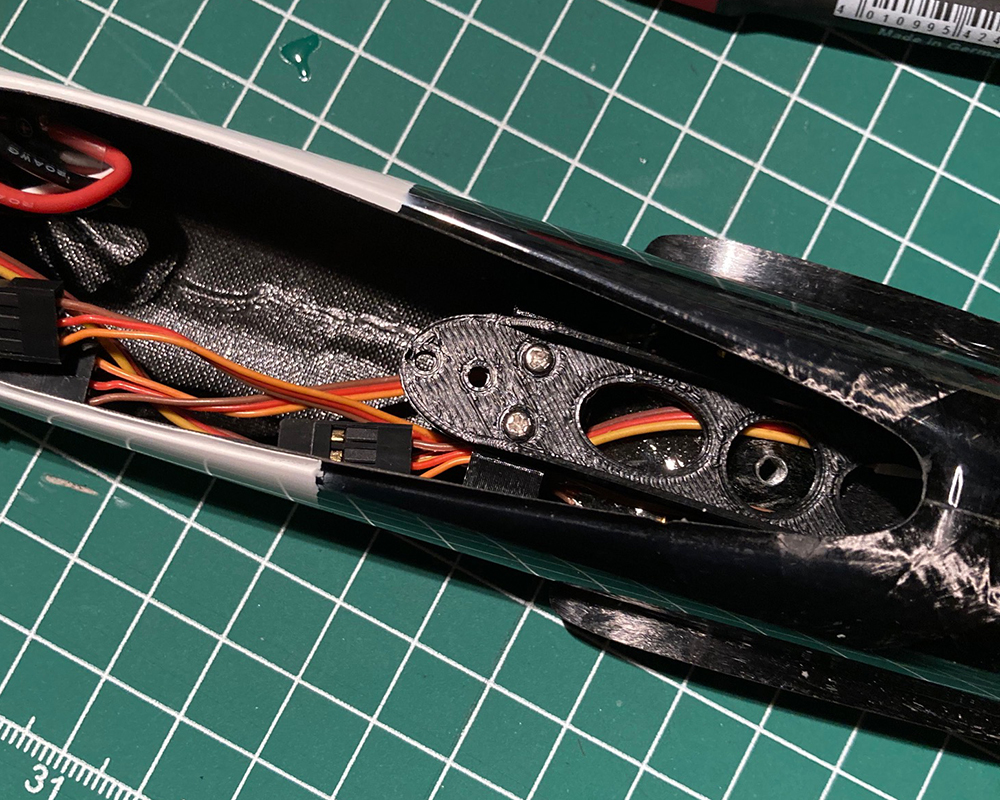
Blick in den Rumpf mit den beiden verlegten Anlenkung.
Detail der Seitenruder-Anlenkung.
Das Servobrett wird nur noch im Rumpf fixiert. Das vordere Halbrund zur Verschraubung habe ich im Rumpf mit zwei kleinen Klebepunkten (CA) fixiert. Diese könnte man im Bedarfsfall (Servobrett muss wieder vollständig aus dem Rumpf entfernt werden) mittels Aceton lösen.
Das war es im Groben… Servoabdeckungen an den Flächen zuschneiden, Komponenten korrekt im Rumpf positionieren und dabei Schwerpunkt und EWD ausloten.
Stand: 21.11.2020

Eigenkonstruktion einer 3D-Messlehre für die exakte Einstellung der Ruderausschläge.

Messlehre am Querruder (Magnet-haftend)