NAN Explorer F5J
Private Baudokumentation
Dieser Blog befasst sich mit der Baudokumentation eines NAN Explorer F5J-Hochleistungsflugmodell. Es handelt sich um eine rein private Dokumentation. Mein besonderer Dank geht an Jeremy, der mir bei meinem Projekt mit Rat und Tat beiseite stand.
Technische Ausstattung:
- Model: NAN Explorer 3,8m (Vertrieb: www.cumulusmodellbau.de)
- Antrieb: Florian Schambeck POWERLINE MICRO 1015 TURBO 2S
- Regler: YGE 60LVs
- Luftschraube/Spinner: Freudenthaler 16×8,5 Propeller mit versetztem Spinner (sorgt für besser anliegende Propellerblätter beim Segeln)
- Servos: 6x MKS HV 6110 Digital
- Anlenkung: IDS MONO von servorahmen.de
- LiPo: SLS Quantum 1.000mAh 2S1P 7,4V 30C/60C oder SLS XTRON 1.250mAh 2S1P 7,4V 30C/60C
- Sender: JETI Duplex 2,4EX Handsender DS-16
- Empfänger: JETI Duplex 2.4EX R9
- Telemetrie: JETI Duplex MVario2 EX und JETI Duplex MUI50 EX
Gewicht flugfertig:
- Rumpf: 350 g
- Höhenleitwerk: 35 g
- Seitenleitwerk: 27 g
- Flächenmittelteil: 358 g
- Linke Fläche: 179 g
- Rechte Fläche: 176 g
- Flächenschrauben: 7 g
- Flächenverbinder: 21 g
Sonstiges:
-
- SLS Quantum 1.000mAh: 68 g
- SLS XTRON 1250mAh: 87 g
- JETI Duplex MUI50 EX (nachgerüstet): 19 g
Gesamtgewicht:
1.172g
zzgl. LiPo
Rumpf:

Ende Mai 2018 konnte ich das bestellte Modell bei Rudi Nahm persönlich in München abholen. Vielen Dank an dieser Stelle an Rudi für das freundliche Gespräch, die ausführliche Beratung und die zahlreichen Tipps und Tricks!

Als Antrieb kommt ein Florian Schambeck POWERLINE MICRO 1015 TURBO 2S zum Einsatz.

Motor, Spinner und Luftschrauben(-gummi) montieren. Sämtliche Schraubverbindungen an Antrieb und Spinner habe ich mit Schraubensicherung fixiert. Wichtig: Distanzschrauben zwischen Spinner und Getriebe nicht vergessen! Ansonsten kann das Getriebe Schaden nehmen, sollte man unsanft auf der Nase landen. Motorspant einpassen: Der mitgelieferte Motorspant aus Carbon von Florian Schambeck passt exakt auf den bereits vorbereiteten Rumpf. Ausrichten des Spants.
Zum verkleben des Motorspants mit dem Rumpf verwende ich mit Carbonpulver eingedickter Zwei-Komponenten-Kleber (UHU Endfest 300). Klebeflächen unbedingt vorher aufrauen und fettfrei halten!

Zum verschleifen der Bauteile verwende ich unter anderem die ebelin 4in1 Buffer-Nagelfeile von dm. Ja, richtig gehört. Die kostet nämlich nur 1,95 EUR und bietet vier unterschiedliche Reibflächen, von feilen bis polieren!

Motorspant eingeklebt (Positionierung beachten, siehe nächster Schritt), mit leichter Gehrung verstehen, Klebereste entfernt und aufpoliert. Kann sich sehen lassen.

Die Ausrichtung des Motorspant bzw. des Motors habe ich so gewählt, das die Lage der Stromkabel seitlich am Rumpf entlang, also 90° verdreht, erfolgt. Somit steht der Regler aufrecht und ich kann später meinen flachen 2S-Lipo genau daneben positionieren.

Zum aufpolieren von Klebestellen verwende ich nicht nur besagte Nagelfeile, sondern auch einen Dremel mit entsprechendem Politur-Aufsatz.

Einpassen der Steckverbindung Rumpf/Flügel für Signalübertragung und Stromversorgung zu den Flügelservos. Ich verwende hier einen Multiplex MPX-Stecker (M6), mit dem Modell mitgeliefert wird ein D-SUB 9P. Der erinnert mich aber zu sehr an einen alten C64, zudem ist der Multiplex einiges leichter, birgt aber mit nur sechs statt neun Kontakten auch einen gravierenden Nachteil, auf den ich gleich eingehe.

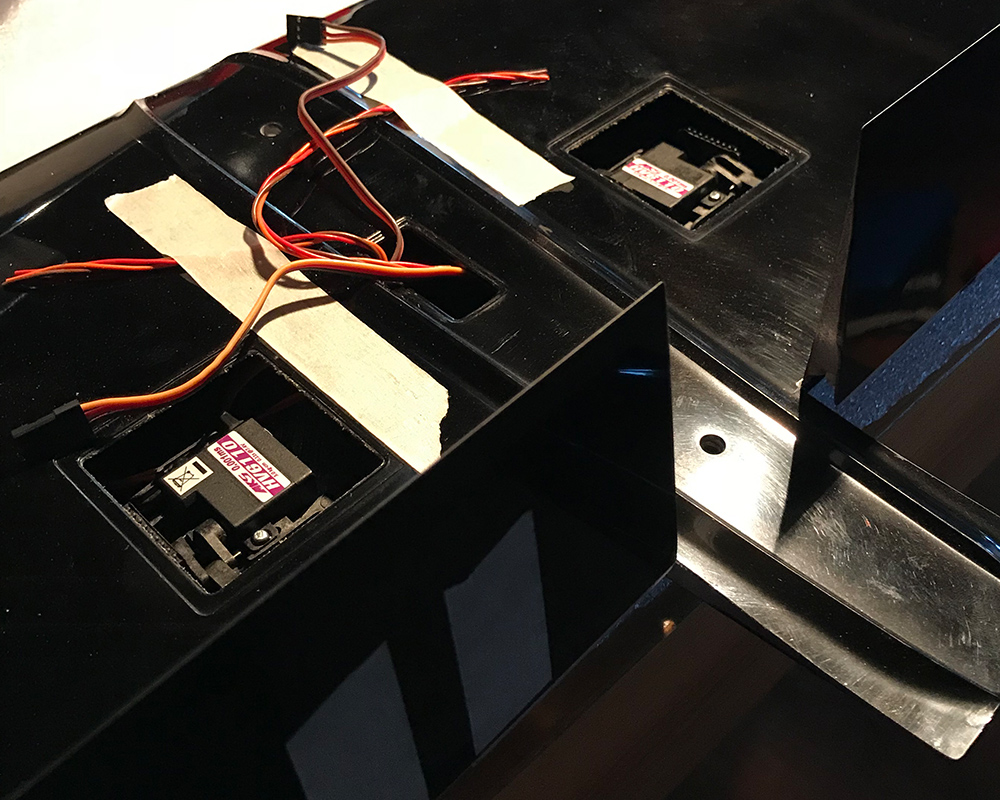
Für die Fixierung der Servos HR/SR auf dem Servobrett säge ich kleine Quadrate aus einer 5mm Verbundplatte und verfeile diese. Mithilfe eines Eddings färbe ich diese noch schwarz ein.

Nun wird das Servobrett in den Rumpf eingeschoben und die Servopositionierung über die Rumpföffnungen aufgezeichnet. Nachfolgend definiere ich die Position der Montageblöcke (Holzquadrate), klebe die angrenzenden Stellen ab und raue die Klebestellen mit Schleifpapier auf.

Nachfolgend setze ich die Öffnungen für die Kabelführung, diese soll der Optik wegen weitestgehend unterhalb dem Servobrett verlaufen.

Ruderhörner für die Seiten- und Höhenruder-Anlenkung entsprechend angepassen.

Die angepassten Ruderhörner in Neutralposition am Servo montieren. Servos auf Servobrett montieren. Unbedingt die Montageblöcke aus Holz vorbohren, bevor die Schrauben eingedreht werden, sonst bricht gegebenenfalls das Holz aus.

Kabelführung unter dem Servobrett.

Servos fertig montiert. Die Bohrung in den Ruderhörnern musste an die mitgelieferten Gabelköpfe angepasst werden.
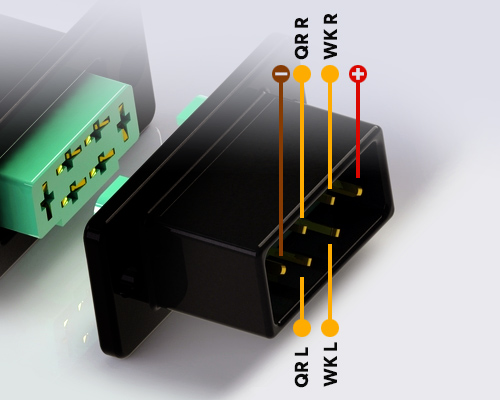
Anlöten der Servokabel zwischen Empfänger und MPX-Stecker. Die Belegung erfolgte vom Stecker ausgehend der Ruderreihenfolge ( + / WK / QR / – ).

In unserem Fall werden zwei Kabel (+/-) zur Stromversorgung vom Empfänger an den MPX-Stecker geleitet, von den beiden anderen Servokabel wird nur das Signalkabel (orange) verwendet, die stromführenden Litzen werden versetzt abgeschnitten um einem Kurzschluss entgegenzuwirken. Rudi Nahm wies mich darauf hin, dass er die Kabel einfach aus dem Stecker zieht, dazu müsste man einfach die Rückhaltelaschen anheben.
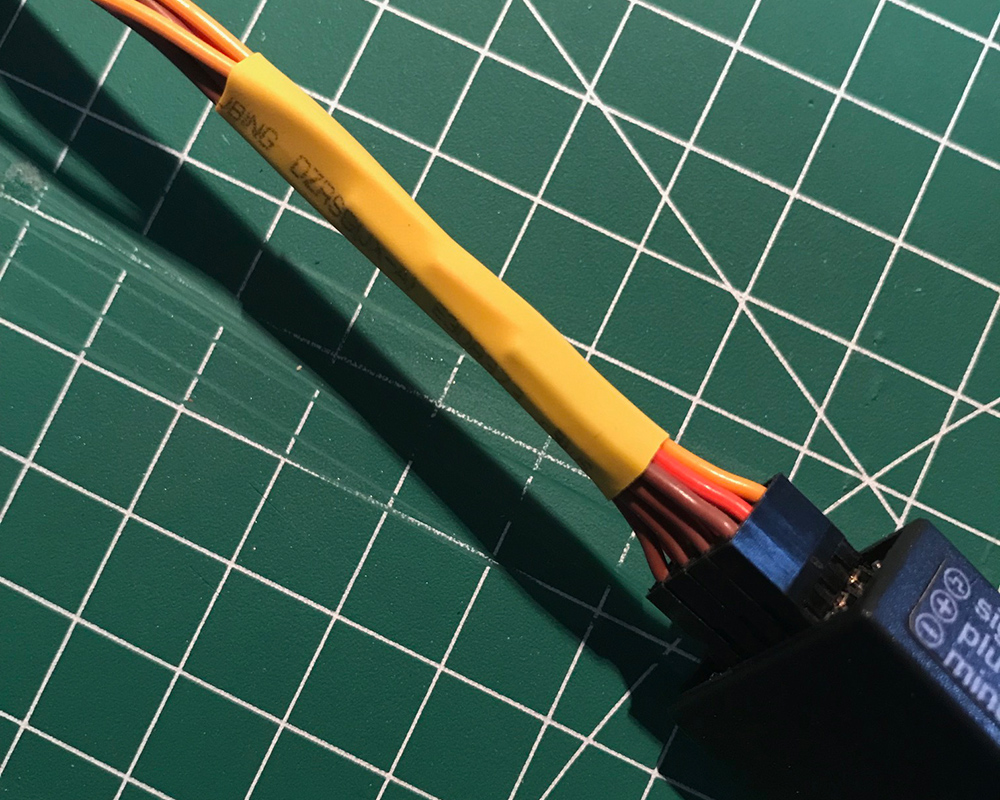
Unter dem Schrumpfschlauch zeichnen sich die versetzten Kabel schön ab. Zwei Stromzuführungen vom Servo ab deshalb, sollte am Empfänger mal ein Kabelkontakt unterbrochen sein, fällt nicht die komplette Stromversorgung am Flügel aus. Und hier kommen wir zum Problem des MPX-Steckers. Hier haben wir für + und – jeweils nur einen einzigen Kontaktstift. Hat einer von beiden im Flug einen Aussetzer, kann es teuer werden. Mit dem mitgelieferten SUB-D 9P könnte man je zwei Kontakte pro Polung belegen, redundant sozusagen.

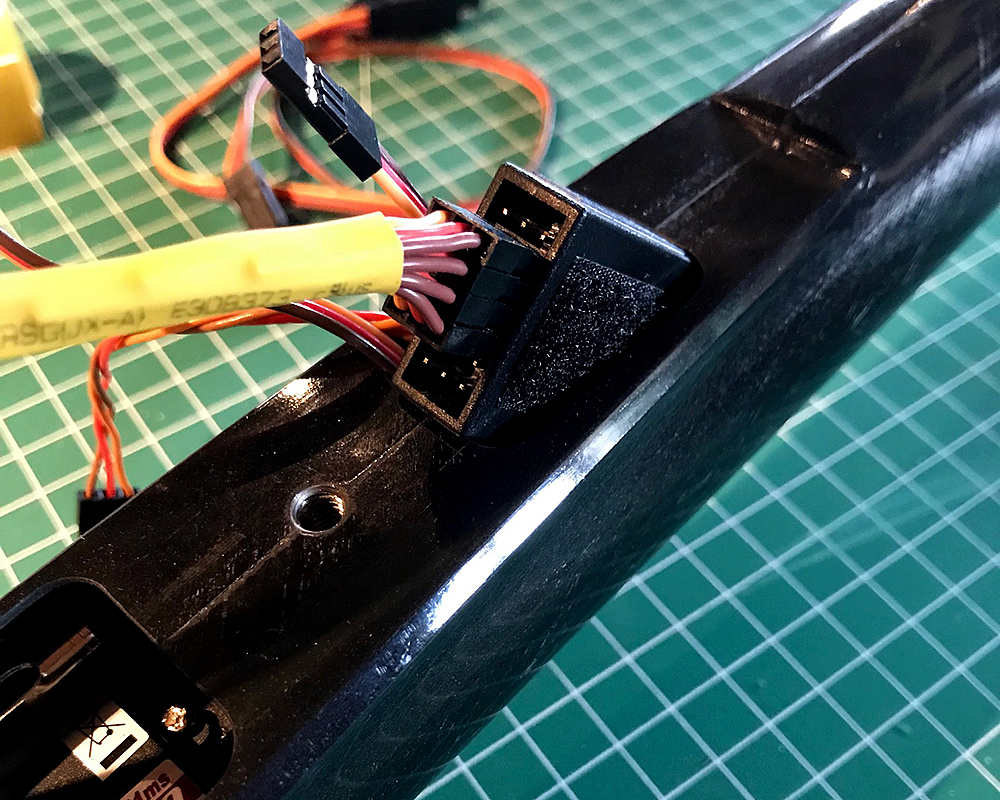
Angelötete Kabelenden am MPX-Stecker.

Der Empfänger wird hinter dem Servobrett, leicht nach unten versetzt positioniert, um geradelinig die Servokabel, die unterhalb vom Servobrett verlaufen, entgegen zu nehmen. Dazu schneide ich ein Stück vom bestehenden Servobrett ab, beklebe dieses mit Klettband und…

…positioniere dies hinten im Rumpf. Fixierung erfolgt über UHU Endfest 300.

Positionierung des MVario2 EX auf dem Servobrett.
Leider passt der R9-Empfänger nicht durch die Rumpföffnung.
Es hilft in dem Fall nichts, die Rumpföffnung muss vergrößert werden.

Die Kanten werden sauber verfeilt.

Nachdem der Empfänger nun in den Rumpf passt und dort positioniert wurde werden die Antennenlöcher im Rumpf angebracht.


Die Verkabelung liegt für den gegenwärtigen Bauabschnitt schon mal ganz sauber.

Einkleben des MPX-Steckers mit UHU Endfest 300. Die Kontaktflächen werden mit dem Dremel leicht angefräst.

Die Fugen werden ebenfalls mit einer Mischung aus UHU Endfest 300 und MicroBubbles (Glaskugeln) als Füllstoff verfugt und mit einem Streifen Tesa geglättet. Nach dem aushärten kann dieser Streifen wieder entfernt werden.

Im nächsten Schritt werden die Servos genau über den Rumpföffnungen positioniert. Nun wird das Servobrett mit dem Rumpf verklebt, ebenfalls mit UHU Endfest 300 und MicroBubbles. Nach dem aushärten können die Ruderanlenkungen in die Ruderhörner verklebt werden. Auch hier sollte das Carbongestänge an den Klebestellen aufgeraut werden.

Im vorderen Teil des Rumpfs wird neben dem Regler ein Streifen Klettband eingeklebt. Dieses fixiert später den Lipo.
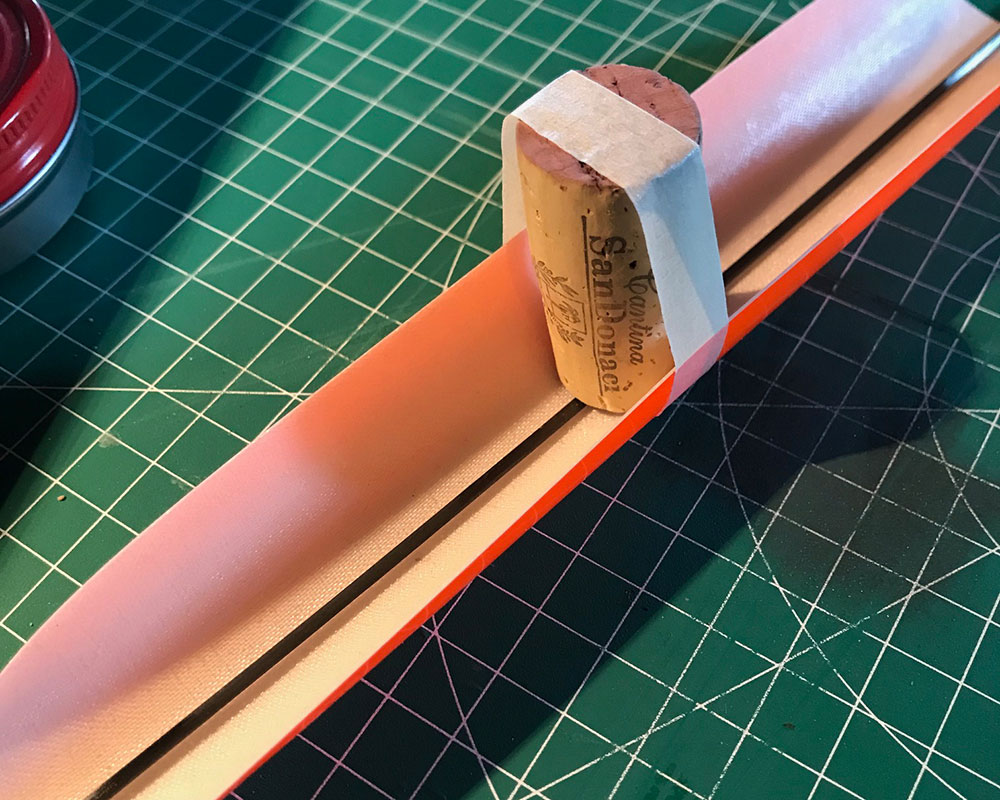
Für die Haubenfixierung verwende ich ein Stück der Carbon-Ruderanlenkung, die übrig war. Um die Carbonstange zum verkleben in der korrekten Biegung zu halten, presse ich diese mithilfe eines Weinkorkens und etwas Tape in die Innenseite der Haube. Nun nur noch den Regler mit dem Empfänger verbinden und der Rumpf des NAN Explorer wäre soweit fertig.
Flächen mit IDS-Anlenkung:

An den vier Servorahmen fräse ich eine kleine Ecke aus, dass das Servokabel nach dem Einbau nicht geknickt wird (siehe gelbe Anmerkung).

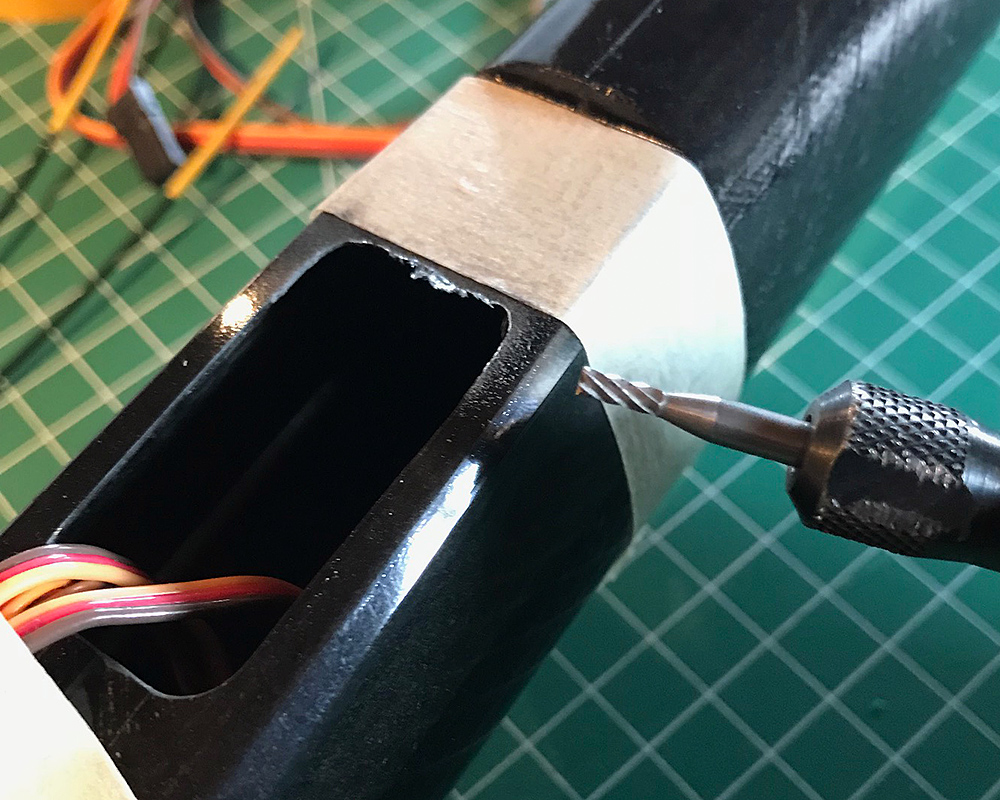
Kommen wir zum spannenden Teil. Flügelausbau mit IDS-Anlenkung. Das heißt auch, mit dem Fräser entsprechende Öffnungen für die Schubstangen und Scharniere am Flügel anbringen. Wir beginnen mit den Querruder-Anlenkungen. Ich messe hier den Abstand zwischen Steckfläche/Flügelende innen bis zum Servoschacht mit eingelegtem Servorahmen. Den Servorahmen so platzieren, dass er oben wie unten am Flügel verklebt werden kann. (Achtung, auf dieser Abbildung ist die Schubstange falsch rum montiert!)

Dieses Maß übernehme ich auf die Oberseite vom Flügel mittels Kreppband, um dort die Position der Fräsöffnung am Ruderscharnier und Lasche zu definieren. Mit Dremel und einem entsprechenden Fräser setze ich nun die Öffnung/Aussparung für die Schubstange bzw. das Scharnier. Wenig Drehzahl, vorsichtig und langsam arbeiten! Lieber mit der Feile nacharbeiten!

Detail der Ausfräsung im Flügel. Ab hier wird gefeilt.

Das gleiche direkt am Ruder, unterhalb der Aussparung an der Lasche. Hier wird später das Scharnier für die Anlenkung eingeklebt.

Als Arbeitshilfe habe ich mir im Baumarkt einen 90°-Kunststoffwinkel aus einer Profilstange abgesägt.

Nun wird die Schubstange und das Scharnier montiert*, dazu das Ruder wieder mittels 90°-Winkel in Position halten. Die Montage wird in die gefräste Öffnung im Flügel geschoben, das Scharnier nach unten in die gefräste Öffnung am Ruder eingeführt. Sollte dies vom Winkel her nicht gehen, 90°-Winkel entfernen, das Ruder ganz vorsichtig Richtung Neutral zurückstellen, das Scharnier springt dann selbst in die Ausfräsung.
* Solltet Ihr mit der verwendeten Länge der Schubstange noch unsicher sein, verwendet vorab nicht die mitgelieferte Scharnierachse, sondern eine etwas dünnere, die leicht wieder entfernt und gegen das Original ausgetauscht werden kann. Ist die Original-Achse nämlich einmal in das Scharnier eingepresst, bekommt man die kaum wieder raus.

Den Winkel als Montagehilfe anbringen, Scharnier wieder leicht herausziehen, Zwei-Komponenten-Kleber (UHU Endfest 300) auf die angeraute Klebestellen aufbringen.

Scharnier auf die korrekte Position einschieben.

Das Scharnier in korrekter Position von allen anderen Seiten einkleben. Darauf achten, das die Schubstange genau rechtwinklig in den Flügel führt! Klebestellen aushärten lassen.

Vorbereitung der Servorahmen. Dazu wieder sämtliche Klebestellen aufrauhen! Auf das Servo selbst klebe ich einen Streifen Kreppband, das dient in dem Fall als leicht haftende Trennschicht zwischen Servo und herausquellende Kleberreste beim andrücken des montierten Servos in die Fläche. Man könnte natürlich auch den Servorahmen ohne Servo zuerst einkleben, mir ist es aber so lieber, da ich die Position von Servorahmen, Schubstange und Servo vor dem Aushärten des Klebers noch ausrichten kann.

Montage im Flügel vor dem einkleben der Servorahmen.

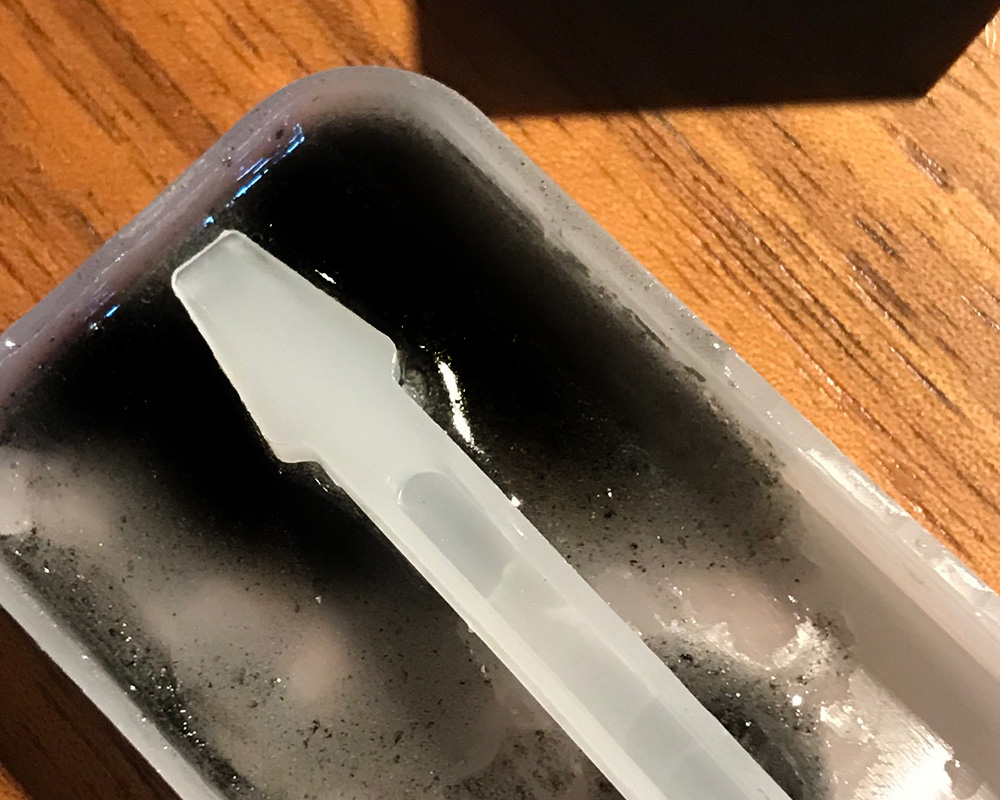
Da die Platzverhältnisse im Flügel zwischen Servorahmen und Klebefläche sehr beengt ausfallen, zudem der Kleber ja UNTER den Servorahmen muss, baue ich mir eine entsprechende Hilfe mittels einer Dosierkappe und einer Einwegspritze.

…

Nach dem einkleben Sorge tragen, das die Servorahmen während dem aushärten der Klebestellen gut angepresst werden! Ich behelfe mir mit einem kleinen Distanzstück und einer Packung Diabolo Bleikugeln.

Direkt nach dem einkleben und beschweren lässt sich die Ruderposition nochmals exakt auf neutral positionieren, der Servorahmen rutscht ja noch auf der Klebestelle hin- und her. Folgend aushärten lassen.

Gleiches Spiel bei den Wölbklappen. Erst wieder ausmessen, die Maße auf beide Seiten der Flügel übernehmen und mit Kreppband markieren.

Vorsichtiges einfräsen der Öffnungen für die Anlenkung. Lieber mehr feilen als fräsen, da geht weniger schnell schnell viel kaputt.

Korrekte Länge der Anlenkung ausmessen und mit Scharnier montieren.
Dabei behelfe ich mir wieder der 90°-Winkel. Mit 90° Servoweg möchte ich 90° am Ruder erreichen. Ich messe den benötigten Weg an der bereits am Ruder eingeklebten Anlenkung im Servoschacht aus. Entsprechend dem Ergebnis wähle ich einen passenden Servoarm.

Einkleben der Anlenkung in die Wölbklappe…

Diese Servostellung zeigt den maximalen Ausschlag sowie die maximale (Flugwind-)Belastung an der Wölbklappe (90° zur Fläche). Die Servostellung liegt absichtlich auf dem mechanischen Totpunkt. Dieser liegt vor, wenn die Gelenke und die einwirkenden Kräfte auf einer Linie liegen. In diesem Punkt wirkt die Kraft nur auf die Lagerstellen des Mechanismus (Servolager), und nicht auf den Antrieb des Servos (keinerlei Kraftaufwand in dieser Position für den Servo).
Ich aktiviere die Fernbedienung, stelle den Wölbklappengeber auf vollen Ausschlag und klebe dann die Servorahmen exakt in dieser 90°-Position ein. Die Fernbedienung lasse ich so lange aktiv, bis der Kleber vollständig ausgehärtet ist.

Dazu habe ich mir noch ein Verlängerungskabel zwischen Flügel und Rumpf gebastelt, was die Handhabung wesentlich vereinfacht.

Als vorerst letzten Schritt an der Ruderanlenkung klebe ich die Flügelflächen und den Servorahmen mit Kreppband ab…

…tränke ein Stück Schaumstoff in UHU Endfest 300. Dieses positioniere ich dann zwischen der geriffelten Fläche vom Servorahmen und dem Flügel. Somit erreichen wir eine 3-Punkt-Verklebung des Servorahmens.

Die beiden Rumpfstücke verklebe ich mit normalem Testfilm, dies lässt eine nachträgliche Wartung zu. Im hinteren Teil des Rumpfs, genau vor dem Höhenmesser, positioniere ich noch zwei Schaumstoffstücke, die die verwirbelten Luftmassen vom TURBO-Antrieb ein wenig vom MVARIO abhalten.
…es folgt die Programmierung der Flugphasen.
Stand: 09.07.2018
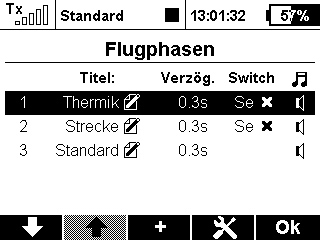
Ich programmiere drei Flugphasen (Standard / Strecke / Thermik) und orientiere mich grob an den herstellerseitigen Angaben hinsichtlich Ruderausschläge.

Dies sind die Einstellungen des Expo, wobei ich hier den Wert sicher noch nach oben korrigieren werde. Das Modell reagiert extrem feinfühlig auf Steuerbewegungen.

Dies sind meine Einstellungen der Querruderdifferenzierung.

NAN Explorer mit meinem Blaster 3 von Vladimir’s Model.
